728x90
무인 비행장치의 조종
무인 비행장치의 조종에 대해 기록한다.
※ 직전 글:
※ 주요 이전 글:
1. 회전익 항공기의 비행 원리 = 방향
1) 회전익 항공기의 비행 원리
고정익 항공기도 회전익 항공기와 운동하는 원리는 동일하다.
- 가로축: pitch
- 세로축: Roll
- 수직축: Yaw
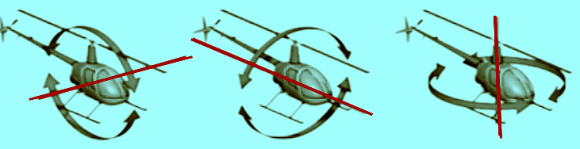
- pitch : 엘리베이터. 전진과 후진 비행을 담당하며 "종요"라고도 한다.
- Roll : 에일러론: 좌, 우로 이동을 담당한다. "횡요"라고도 한다.
- Yaw : 러더: 좌, 우로 회전 운동을 담당한다. "편요"라고도 한다.
2. 무인 비행장치 스틱 운용 방법
1) 비행조종 모드
- 무인비행기의 비행조종 모드에는 쓰로틀(Throttle) 스틱, 에일러론 스틱, 엘리베이터 스틱, 러더 스틱이 있다.

- 쓰로틀(Throttle) : 앞쪽으로 조작하면 비행기 동력장치의 출력이 증가되며, 뒤쪽으로 조작하면 비
행기 동력장치의 출력이 감소하게 된다.(throttle: 목을 조르다, (연료) 조절판)
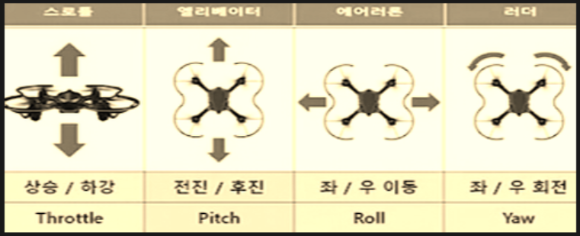
- 엘리베이터 : 엘리베이터 스틱을 UP으로 조작하여 엘리베이터가 위쪽으로 올라가면 비행기가 상승 동작을 하고 , 엘리베이터 스틱을 DOWN으로 조작하면 비행기의 엘리베이터가 아래쪽으로 내려가면 비행기가 강하 동작을 한다.
- 에일러론 : 좌측으로 조작하면 비행기의 좌우 에일러론이 상하로 움직여 좌선회 동작을 하고, 우측으로 조작하면 비행기의 에일러론이 상하로 움직여 우선회 동작을 한다.(aileron: 전문 용어 (비행기의) 에일러론[보조익])
- 러더 : 좌로 조작하면 비행기의 러더가 좌로 움직여 비행기 기수가 좌로 움직이는 동작을 하고, 조종기의 러더 스틱을 우로 조작하면 비행기의 러더가 우로 움직여 비행기 기수가 우로 움직이는 동작을 한다. (rudder: 배, 항공기의 방향타)
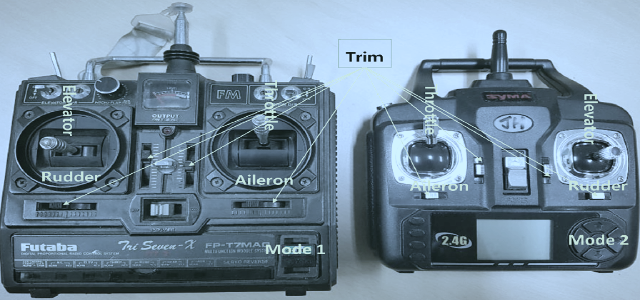
2) 스틱 모드별 분류(스틱 배열에 따른 분류)
- 조종기는 스틱 배열에 따라 Mode 1, Mode 2로 분류한다.
- Mode 1 방식의 조종기: 좌측 스틱에 엘리베이터와 러더, 우측 스틱에 쓰로틀과 에일러론
을 조종할 수 있도록 배열한 것을 말한다. - Mode 2 방식의 조종기: 좌측 스틱에 쓰로틀과 러더, 우측 스틱에 엘리베이터와 에일러
론을 조종할 수 있도록 배열한 것을 말한다. Mode 2 방식의 조종기는 실제 비행기(조종간-엘리베이터/에일러론, 쓰로틀 레버, 러더 페달)에 따른 비행기의 조종 장치 배열을 적용한 방식이다.
3) 조종자의 전방 주시의 중요성
- 조종자의 시각은 조종자는 기체의 전방부를 보고 비행하여야 하고 후방 위치는 모니터링과 전방주시의 기체 자세를 파악하기 위한 보조수단으로 보아야 한다.
3. 조작 방법
1) 멀티콥터와 헬리콥터의 스로틀 조작방법
- 모드 1 = 우측 스틱이 에일러론 스로틀
- 모드 2 = 우측 스틱이 에일러론/엘리베이터
- 조종자는 비행 전 필히 조종기의 조종 스틱 모드를 확인해야 함
2) 멀티콥터의 엘리베이터 조작
- 기체의 기수 방향 기준 앞/뒤 프로펠러의 회전 수를 조절하여 전/후진 이동
- M3과 M4의 회전력이 상승하면 기체는 전진하며,
- 반대로 M1과 M2의 회전력이 상승하면 기체는 후진 비행을 하게 됨.
3) 회전익 항공기 엘리베이터 조작
- 회전익 헬리콥터는 엘리베이터를 밀면 회전면이 전진 방향으로 기울게 되어 전진 비행을 하게 되고
- 반대로 엘리베이터를 당기게 되면 회전면이 뒤로 기울게 되어 후진 비행을 하게 됨
4) 고정익 항공기 엘리베이터 조작
- 고정익 항공기는 엘리베이터를 밀게 되면 기수가 아래로 향하게 되어 하강 비행이 되며,
- 반대로 엘리베이터를 당기게 되면 상승비행을 하게 되고
- 고정익에서 연속된 상승비행은 충분한 추력 발생이 있어야 가능함
5) 멀티콥터 에일러론 스틱 조작
- 멀티콥터의 에일러론 스틱 조작은 기수 방향을 기준으로 좌/우 프로펠러의 회전 수를 조절하여 기체를 롤(Roll) 축을 기준으로 이동하고자 하는 방향으로 기울여서 그 방향으로 이동시키는 조작이다.
6) 회전익 헬리콥터 에일러론 스틱 조작
- 회전익 헬리콥터의 에일러론 조작은 멀티콥터와 조작은 유사하지만 사이클릭 회전면의 기울기를 좌, 또는 우로 기울여 회전면의 추력 방향으로 기체를 이동시키는 기동을 뜻한다.
7) 고정익 항공기 에릴러론 스틱 조작
- 고정익 항공기의 에일러론 조작은 롤링이라고 하며 주익 기울기를 좌, 또는 우로 기울여 기체를 선회시키는 기동을 의미하고 주익의 기울기를 뱅크각이라고 하며 뱅크각의 크기에 따라 선회반경이 달라진다.
8) 멀티콥터 러더 조작
- 기수 방향을 기준으로 대각선으로 마주한 프로펠러의 회전수를 조절하여 기체에 반대 토르크를 발생시켜 기체의 수평을 유지한 채 기수의 방향을 좌/우로 전환하는 조작이며, Yaw 회전 이라고도 부른다.
9) 회전익 헬리콥터 러더 조작
- 회전익 헬리콥터의 러더 조작은 기수 방향을 기준으로 테일 로터의 피치를 조절하여 기수의 방향을 좌/우로 전환하는 조작이며 Yaw 회전 이라고도 한다.
10) 고정익 항공기의 러더 조작
- 고정익 항공기의 러더 조작은 기수 방향을 기준으로 수직 안정판의 러더를 조작하여 기수의 방향을 좌/우로 전환하는 조작이며 Yaw 회전이라고도 한다.
4. 비행 전날 및 당일 준비사항
1) 비행 전날 준비사항
- 조종장치 배터리 충전 및 확인
- 메인 기체 배터리 충전 및 확인
2) 비행 당일 준비사항
- 기체 운반 시 주의사항
- 기체 확인
3) 비행 전 준비사항
3-1) 유의 사항 확인
- 군 방공 비상사태 발령인지 시에는 즉시 비행중지 및 착륙하기
- 조종사 비상사태 대비 절차 숙지
- 타 항공기/초경량 비행장치 및 고압선 접근 금지
- 비행 중 지상/공중 주위 환경 철저히 고려
- 기상 악화 시 비행제한
- 해당 기체의 최대 능력을 초과한 적재 금지
- 전날 과음, 수면부족 등 조종자의 컨디션 반드시 체크
- 음주 조종은 법적으로 금지되어 있으니 부디 실천하기 바람.
3-2) 안전고도 기본 설정(권장)
- 기체의 고도 한계 설정
- GPS 미수신 시에도 작동
- 오작동시 기체의 불필요한 고도 상승 방지
- 타 기체 및 항공기와 격돌 방지
- 안전고도를 설정하면 기체가 설정된 안전고도에 도달 시 조종장치의 고도를 상승시켜도 기체의 고도가 더 이상 상승하지 않음 - 비행장치의 안전고도는 GPS 미수신의 경우에도 상시 작동되기 때문에, 불필요한 기체의 과다한 상승 고도로 인해 다른 기체 및 항공기와 부딪히지 않을 수 있음.
3-3) 기본 설정 정보
- 기체의 운용반경 제한
- 전파 수신 및 장애 대비 차원
- 오작동시 기체 이탈 방지
- 플라이트 컨트롤러가 장착되지 않은 비행체일 경우는 페일세이프 설정을 스로틀 최저, 기타 작동장치는 뉴트럴로 설정 - 그러나, 페일세이프는 전파 교란 시 기체가 풀 속도로 가속되어 충돌되는 가속도를 줄일 수 있을 뿐, 안전을 보장하지는 않기 때문에, 드론 비행은 전파교란의 염려가 없는 장소에서 하는 것이 좋다.
3-4) 안전 구역 확보
- 비행장치 이착륙 지점 확보할 것.
- 자동복귀 시에는 비행하고 있던 위치에서 복귀 지점까지 최단 경로를 따라 복귀하기 때문에 주변에 장애물이 없는 지역에서 이륙시킬 것.
- 비행체 주변(약 10미터 이내)에는 조종사 포함하여 타인이 다가가지 않도록 통제할 것.
3-5) 비행 전 체크리스트 확인
- 비행 당일 점검자 육안 확인: 기체 외관상의 파손 여부, 프로펠러, 모터, 커넥터, 배선 등의 이상 유무, 볼트와 너트의 결합상태 등 확인할 것
- 배터리 상태 확인: 조종장치 및 기체 배터리 충전상태 확인, 배터리 전압 테스터기 사용(배터리 체커, 전압계 등)할 것.
5. 비행술
1) 평가기준 4대 요소
- 드론의 위치
- 드론의 고도
- 드론의 기수 방향
- 드론의 흐름
2) 종합 수행능력 기준 5대 요소
- 조종자의 계획성
- 판단력
- 규칙의 준수
- 조작의 원활성
- 안전거리 유지
3) 국가자격 코스 삼각 비행 연습
- 이륙하여 정지비행으로 기체 점검
- 1) 기준 고도를 이륙하여 정지한다
- 2)에일르론과 엘리베이터 작동 점검
- 3) 러더로 기수 방향 점검
- 4) 점검 후 중앙 러버콘 상공으로 이동
- 정상작동일 경우에는 중앙의 러버콘 상공으로 이동하여 정지비행 실시(정지비행은 5초 이상 실시)
4) 삼각 비행 연습
- 1) 좌로 이동, 에일러론을 좌로 조작하여 기체를 좌측으로 천천히 일정한 속도로 이동하여 좌측 러버콘 상공에서 정지하여 5초간 정지비행 실시
- 2) 상승각은 45도를 유지시키며 정지비행을 실시하고 고도는 기준 고도에서 7.5M를 유지하여야 하며 기준 고도를 3M로 선택하였다면 중앙에서의 상승고도는 10.5M
- 3) 기체를 우측으로 45도 하강 비행하여 우측 러버콘 상공 기준 비행 고도까지 천천히 일정한 속도를 유지하여 하강한 뒤 정지비행을 5초간 실시
- 4) 중앙에 위한 러버콘 상공으로 이동하여 5초간 정지비행을 실시하면 삼각 비행 완료
5) 각 구간별 허용 편차
- 호버링 상공에서는 2M 원호.
- 각 기동에서는 전후 편차 2M.
- 좌우 편차 2M.
- 고도 편차 1M 이내(상승 0.5m+ 하강 0.5m).
6) 드론의 위치
- 드론의 기체 중심이 1M 이내 범주가 허용 편차.
- 기체 중심이 2초 이상 1M를 초과하여 비행하거나 정지하면 불만족 요인.
7) 드론의 고도
- 기준 고도에서 상승 50㎝, 하강 50㎝ 가 허용 편차.
- 기준 고도가 상, 하 합이 스키드 기준으로 1M를 초과하게 되면 불만족 요인.
8) 드론의 기수 방향
- 좌, 우 15도로 합이 30도가 허용 편차.
- 정지 비행 및 기동 중 기수 방향이 좌, 우측 어느 방향으로든 25도 이상을 벗어나게 되면 불만족 요인.
9) 드론의 흐름
- 정지 후 이동 중에는 일정한 속도를 유지하여 비행하는 것.
- 이동 비행 중 상승 또는 하강 비행 중 기체 중심이 전, 후/좌, 우 어느 방향으로든 1M 이상 벗어나면 불만족 요인.
- 이동 중 2초 이상의 정지를 반복적으로 행한 후 이동하는 것도 불만족 요인.
6. 다음 글
다음 글: 항공 기상에 관하여.